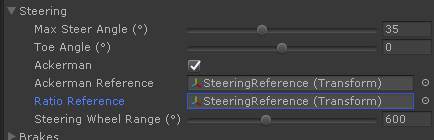
Ratio Reference is used in vehicles with multiple steering axles. In these vehicles the maximum steering angle is proportional to the distance to a reference point in the vehicle, the "pivot of rotation". This reference point is defined with a Transform and configured as "Ratio Reference" in the Steering settings.
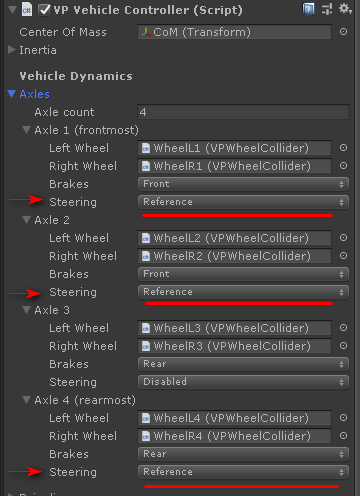
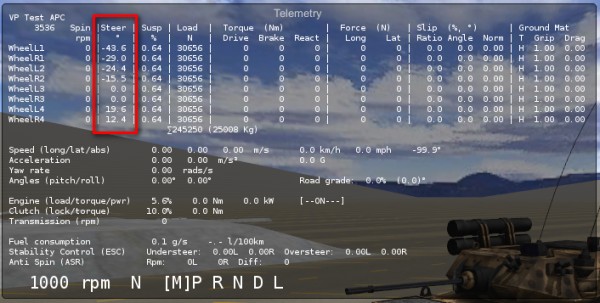
In the following example an 8-wheeled vehicle has 4 axles with steering in three of them. The Ratio Reference is in the middle of the third axis, which doesn't have steering. Thus the maximum configured steering angle is applied in the front wheels, which are the furthest from the reference. All other steering wheels reduce their maximum steering angle proportionally to the distance to the Ratio Reference. Ackerman is also applied using the same reference.